Traditional fixed-wing and rotorcraft designs have limitations in efficiency and maneuverability compared to biological flight systems.
The challenge was to understand and replicate the complex biomechanics of bird flight, including wing kinematics, control mechanisms, and energy efficiency.
My SubTeam, the Single Wing Glider Team, was tasked with designing and manufacturing a drone that mimmicked the propulsion style, flight characteristics of a bird. Furthermore our team was tasked with creating a drone that could be controlled through Throttle, Pitch, Roll, and Yaw. In order to be classified as a Micro Air Vehicle (MAV), this drone had a maximum weight requirement of 50 grams.
Manufacturing constraints and material limitations added complexity to creating a functional flapping-wing mechanism at micro scale.
This project was centered around quickly prototyping, testing, and analyzing different designs and configurations in order to quickly find what methods worked best.The entire FWMAV Team met weekly, where every SubTeam would present and discuss their progress and work.
Controlled testing environments and repeatable manufacturing methods of small components proved to be the basis of all challenges faced in this project.
To simplify the challenge of manufacturing small components with limited tools and resources, many components were 3D printed or repurposed from other similar flapping wing drones that were available for purchase online.
Assembly methods often included the use of quick-drying Epoxy, Hot Glue, Clear Tape, and friction fitting components in order to produce prototypes that could be quickly tested and studied.
My team and I purchased a cheap RC bird toy from Amazon that only gave the pilot control over throttle rpm and circular flight radius. By deconstructing this toy, we were able to repurpose its flapping wing mechanism, battery, and wings for our own designs. Our designs included an upgraded DC Motor (14000kv) and custom fuselage that allowed for the stowage of the electronics required by the larger motor and servos.
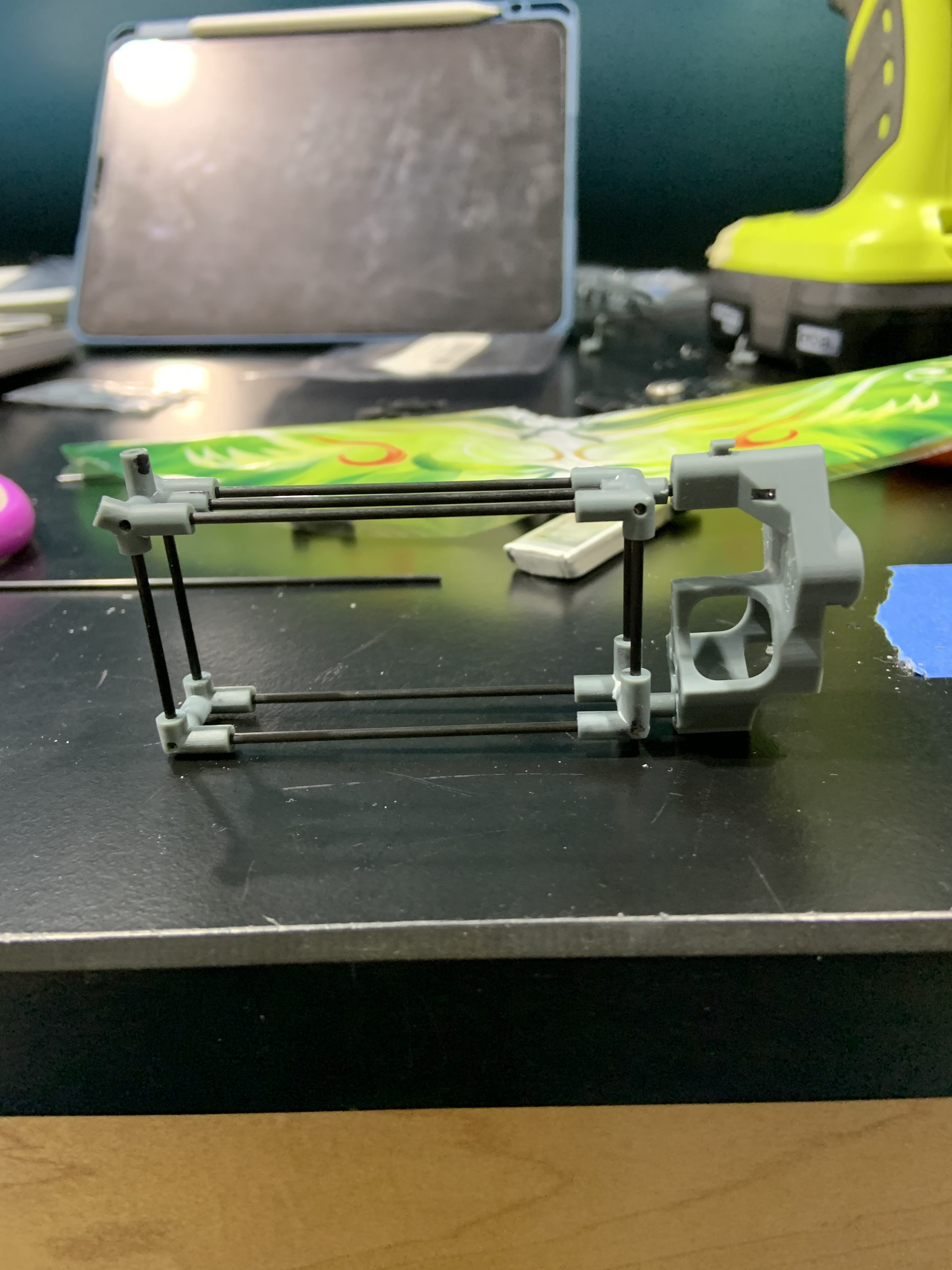
At the start of this project, myself and another engineer were tasked with continuing the work of another engineer who had graduated. The design left to us included only the flapping wing mechanism and control surface tails held together by electrical tape, a 1mm carbon fiber rod, and friction fit components. This design broke within the first few attempts of testing. It was decided that a more robust fuselage was required to properly secure and contain all the required components.
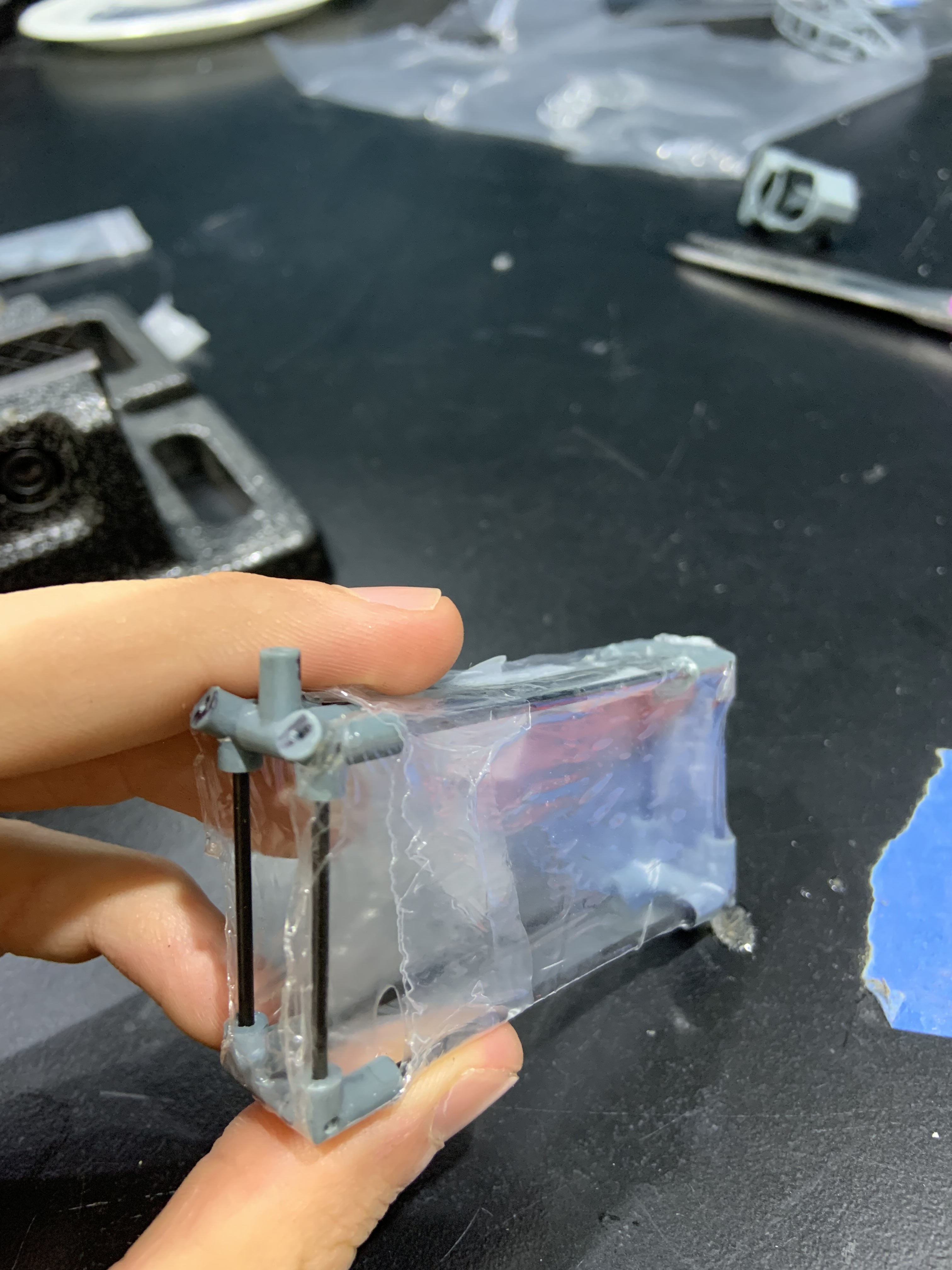
Using SOLIDWORKS I designed a first article fuselage that could contain all the required electronics and would better secure the tail assembly to the flapping wing mechanism. This fuselage and its manufacture were iterated numerous times until the final protoype was completed, manufactured through Stereolithography (SLA) printing.
This fuselage design achieved its requirement to properly house all the required electronics, however it proved to be too heavy for the drone to fly, and pushed the drone well above the 50g weight requirement.
A 3rd engineer joined the Single Wing Subteam, and iterated this design to acheive a new fuselage that met all of its requirements.
For the remainder of my time on the project, my team and I shifted our focus on increasing the robustness of our motor mount assembly and achieving Steady Level Flight.
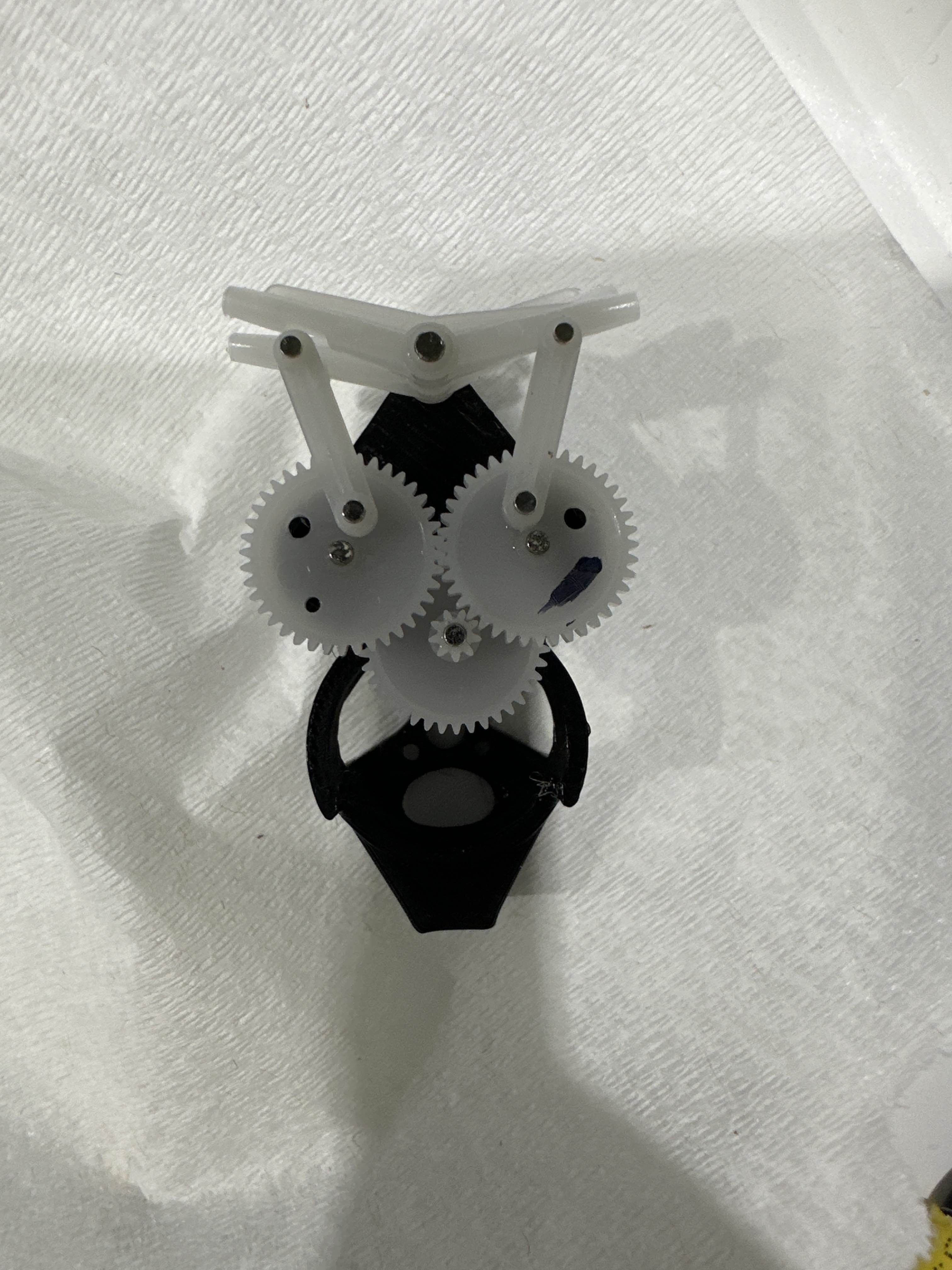
The housing component that secured the repurposed flapping wing assembly often broke or was unusable after only a few test flights, drastically slowing down the test process.
By experimenting hole tolerances in the FDM printed (PLA) housing, as well as by using quick-drying epoxy to properly secure gear pins, I was able to manufacture a motor mount housing that could withstand dozens of tests and high impact crashes without failure. I then authored a set of work instructions that could be used by current and future FWMAV team members to reproduce such an assembly.
- Successful prototype development with 50-gram operational weight
- 200%+ improvement in subassembly lifespan through manufacturing optimization
- Developed repeatable build instructions for team knowledge transfer
.png)



Promotional Video for Single Wing Subteam
Promotional Video of the FWMAV Single Wing SubTeam
Successful Flight Test of a Prototype Configuration
Successful Flight Test of a Prototype Configuration
Prototype Demo
Demo Actuation of a Prototype
Prototype Flight Test Tree Crash
Example of a Crash during a flight test in which the entire drone suffered no damage.
Prototype Flight test
Prototype Flight Test
Client
Undergraduate Research Project
Duration
8 months
Team Size
2-3 engineers
Year
2025